
Su principio de funcionamiento está basado en cambios de intensidad en la luz lo que permite distancias de sensado de hasta 160 metros. Ideales para aplicaciones de presencia-ausencia de objetos en zonas de trabajo libre de polvo, la contaminación en el lente puede obstruir el paso del haz de luz, afectando la funcionalidad de dispositivo.
Tipos:
Retro-reflectivo
Con distancias de detección intermedias es ideal para conteo o presencia ausencia de partes, dentro de la carcasa se encuentra una fuente de luz y un receptor, el haz de luz emitido por la fuente incide en un reflector y es detectado por el receptor. Cuando se interrumpe el haz se activa una señal indicando la presencia de un objeto.
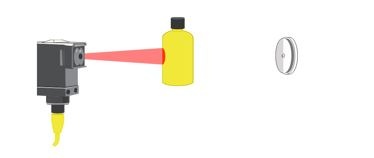 Figura 1: Sensor Retro-reflectivo.
Figura 1: Sensor Retro-reflectivo.
Retro-reflectivo Polarizado
Elimina brillos en los objetos para evitar confusiones entre el reflector y los brillos, ideal para objetos brillantes.
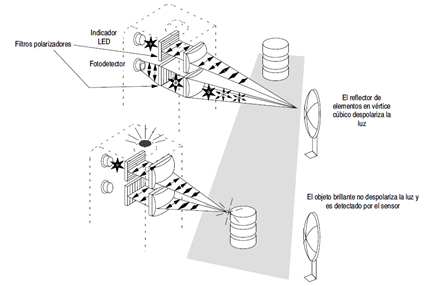
Figura 2: Principio de funcionamiento del retro-reflectivo polarizado.
Los sensores retro-reflectivos polarizados cuentan con filtros polarizadores tanto en el led emisor como en el receptor, estos esta desfasados entre si 90° (Figura 4), de esta manera el sensor no puede ver la luz reflejada por el brillo de los objetos; el reflector (gato) despolariza la luz y la misma podrá llegar al receptor sin problema. El tipo de led sumado a las pérdidas por los polarizadores provocan distancias de sensado más cortas respecto a los retro-reflectivos normales. Importante destacar que si el objeto cuenta con dos envolventes y el segundo es el brillante, el sensor no trabajará adecuadamente y es mejor proponer otra solución.
Por último, no todas las cintas reflectivas trabajan con este tipo de sensores.
Difuso
En la misma carcasa se encuentra tanto el emisor como el receptor, el haz de luz choca con el objeto y retorna al sensor, la cantidad de luz que retorna depende de la reflectividad del objeto, objetos muy brillantes pueden reflejar la mayor cantidad de luz lejos del objeto, mientas que objetos muy oscuros pueden absorber la mayor cantidad de luz y reflejar muy poca para la detección. Por el modo de detección no soporta distancias superiores a 2 metros, y son ideal para aplicaciones donde se complique el acceso en ambos lados del objeto a detectar.
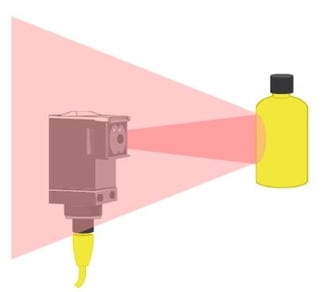 Figura 3: Sensor Difuso.
Figura 3: Sensor Difuso.
Los diferentes tipos de detección serian:
Foco fijo.
La sensibilidad del sensor se encuentra a una distancia fija, el punto focal no varía, a distancias más cortas o largar del punto focal el sensor pierde sensibilidad. Ideal para 3 tipo de aplicaciones:
-
Detección de Marcas o tacas.
Sensor difuso de foco fijo ideal para detección de marcas o tacas, para secuencia de corte, marcado, troquelado, entre otros. Normalmente con distancias de trabajo fijas. Existen modelos para marcas de colores.
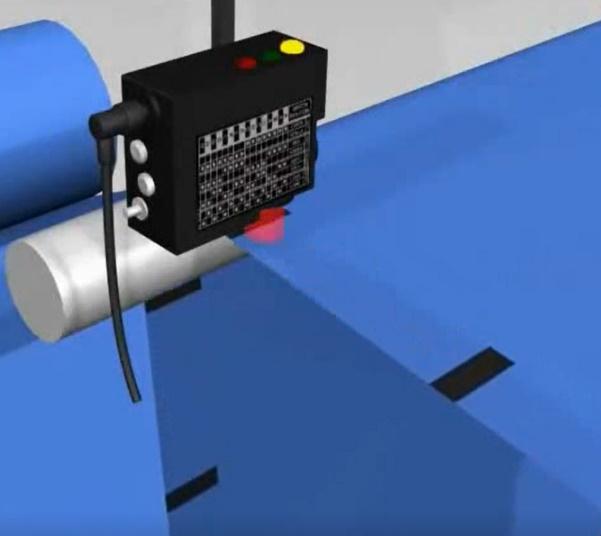
Figura 4: Sensor de Marcas o tacas.
2. Detección de objetos pequeños por su alta sensibilidad.
3. Detección de objetos a una distancia fija; esto porque la mayor sensibilidad se encuentra en el punto focal, permitiendo ignorar el objeto a otras distancias.
Gran angular.
Sensores con un cono de apertura amplio ideales para dos tipos de aplicaciones:
- Pueden detectar hilos muy delgados cerca del sensor aun cuando el hilo se desplace en el campo de visión.
- También pude ignorar orificios pequeños o imperfecciones gracias a su detección en una gran área.
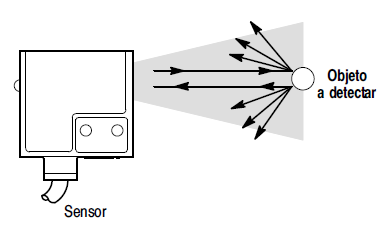
Figura 5: Sensor gran angular
Supresión de fondo.
Es un sensor difuso que elimina el fondo de su campo de visión para suprimir detecciones incorrectas, la distancia se entrena mediante un botón o un potenciómetro.
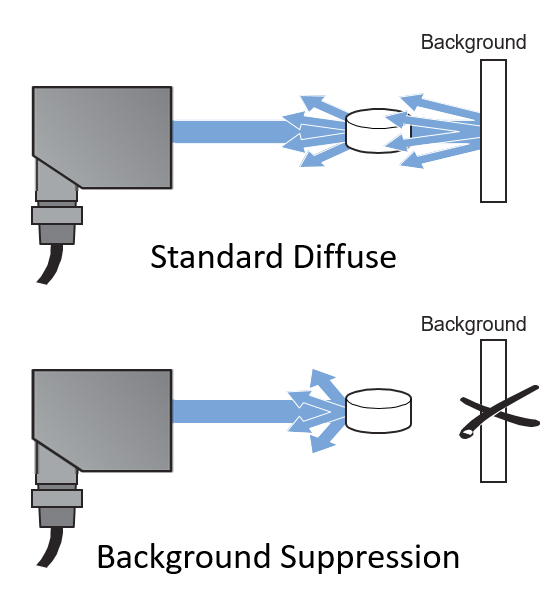
Figura 6: Sensor Difuso supresor de fondo.
Objetos Transparentes.
El encapsulado con una óptica dedicada aumenta el contraste del objeto para su correcta detección, acompañado de una electrónica especial para este tipo de aplicaciones. Ideales para la industria de alimentos y bebidas en aplicaciones de botellas transparentes en la línea de producción. El haz de un sensor retro-reflectivo convencional puede traspasar la botella y nunca detectar la presencia de esta.
Emisor-Receptor (Haz trasmitido)
Normalmente utilizado para largas distancias, a diferencia de los antes mencionados estos modelos trabajan en parejas, emisor y receptor se encuentras en carcasas distintas. Ideales para aplicaciones en entornos industriales con mucho polvo.
La detección de objetos pequeños se realiza con un mejor rendimiento si se reduce el diámetro del haz, para ello es necesario ubicar el objeto a detectar cerca del emisor o del receptor. Este tipo de tecnología no es adecuada para objetos transparentes
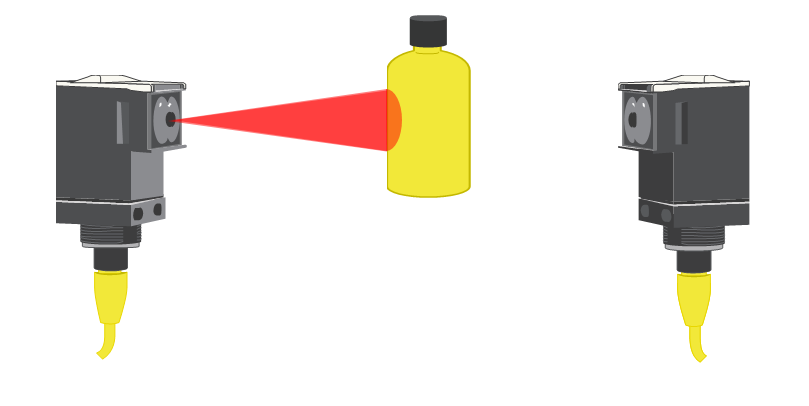
Figura 7: Sensores Emisor-Receptor.
Para eliminar el alineamiento entre sensores Emisor-Receptor se incorporó al mercado este tipo de sensores.
Horquillas

Figura 8: Sensor tipo Horquilla.
Laser
Utilizados para detecciones más precisas, o en aplicaciones con poco espacio entre productos, en las versiones laser se pueden encontrar: Retro-reflectivos, Polarizados, Difusos, Supresores de fondo y Emisor-Receptor. El spot o punto laser puede tener dimensiones de hasta 0.6mm.
Fibra Óptica
Normalmente utilizadas en espacios muy pequeños o con altas temperaturas, requieren de un amplificador para su funcionamiento.
Las fibras pueden ser fabricadas tanto en vidrio como en plástico.
Vidrio:
Formado por hilos de fibra de vidrio son ideales para aplicaciones de altas temperaturas soportando en algunos casos hasta 480°C. Otro punto a considera es su vida útil, mucho más extensa que las plásticas.
Cuentan con dos tipos de recubrimientos: PVC y acero inoxidable, el ultimo tiende a ser más costoso, pero más duradero.
Plástico:
Fabricados con un monofilamento acrílico que los hace menos caros, pero a su vez menos duraderos; ideales para aplicaciones con flexión continua.
En el caso del haz transmitido es necesario utilizar dos cables de fibra, mientras que la detección difuso o retro-reflectiva utiliza un solo cable bifurcado. La detección retro-reflectiva polarizada no es posible con fibras.

Figura 7: Amplificador para fibra.
Entre otros
Para más detalle puede ingresar al siguiente link:
https://ab.rockwellautomation.com/Sensors-Switches/Photoelectric-Sensors
